General Considerations
%20Basic%20negative-feedback%20system,%20and%20(b)%20phase%20shift%20around%20the%20loop%20at%20ω1.jpg)
考虑 Fig. 10.1 的传输函数,容易写出:
\[[X(s)-\beta Y(s)]H(s)=Y(s)\\ \Rightarrow \frac{Y}{X}(s)=\frac{H(s)}{1+\beta H(s)}\]当分母为 0 时,传输函数趋向无穷,电路开始振荡,我们将这种情况称为 Barkhausen’s Criteria,此时的频率满足:
\[\begin{aligned} \vert \beta H(j\omega_1) \vert &= 1\\ \angle \beta H(j\omega_1)&=-180^\circ\\ \end{aligned}\]当然,这只是临界条件,实际上,只要 $\angle \beta H(j\omega_1)=-180^\circ$ 时,$\vert \beta H(j\omega_1) \vert \geq 1$ 就会发生震荡。比如在 Fig. 10.2a 中,在 $-180^\circ$ 处,增益大于 0 dB,所以不稳定。而 Fig. 10.2b 中,增益为 0 dB 时(即 gain crossover),相位大于 $-180^\circ$;或者在相位等于 $-180^\circ$ 时(即 phase crossover),增益小于 0 dB,所以稳定。
%20unstable%20and%20(b)%20stable%20systems.jpg)
我们将 gain crossover 处的频率记为 GX,此时相位离 $-180^\circ$ 的距离称为 phase margin(PM)。phase crossover 处的频率记为 PX,此时增益离 0 dB 的距离称为 gain margin(GM)。易知,要使系统稳定,至少要求 GX<PX,PM>0,GM>0
最后复习一下怎么画 Bode plots,我们主要用两点规则:
- The slope of the magnitude plot changes by+20 dB/dec at every zero frequency and by−20 dB/dec at every pole frequency
- For a pole (zero) frequency ofωm, the phase begins to fall (rise) at approximately $0.1ω_m$, experiences a change of $−45^◦ (+45^◦)$ at $ω_m$, and approaches a change of $−90^◦ (+90^◦)$ at approximately $10ω_m$
利用这两点规则我们可以大致算出 PM。
Consider the stability of a feedback system incorporating a one-pole forward amplifier. Assuming $H(s)=A_0/(1+s/\omega_0)$
$$
H(s)=\frac{A_0}{1+\dfrac{s}{\omega_0}}\\
\Rightarrow \frac{Y}{X}(s) = \frac{\dfrac{A_0}{1+\beta A_0}}{1+\dfrac{s}{\omega_0(1+\beta A_0)}}
$$
we plot $|\beta H|$ and $\angle \beta H$ in Fig. 10.5, observing that a single pole cannot contribute a phase shift greater than $90^\circ$ and the system is unconditionally stable for all nonnegative values of $β$

Phase Margin
系统要稳定,PM 要大于 0,但要大多少呢?前面说过,当 GX 与 PX 重合时($\rm PM=0$),输出会出现振荡,频率响应出现无穷大的点;
而当 PX 稍大于 GX 时($\rm PM>0$),输出会出现衰减的振荡,频率响应出现过冲(Fig. 10.10a);
当 PX 远大于 GX 时($\rm PM \geq 0$),基本上没有振荡,也没有过冲(Fig. 10.10b)。
%20small%20and%20(b)%20large%20margin%20between%20gain%20and%20phase%20crossover%20points.jpg)
图中的过冲对应的就是振荡的幅度,我们可以利用如下方法近似计算过冲:$\beta H = \vert \beta H\vert \exp(\angle \beta H)$,在 GX 处,$\vert \beta H\vert=1$,而 $\angle \beta H=-180^\circ+\text{PM}$,因此我们可以算出该点的 $\beta H$,把 $\beta H$ 代入 $\frac{Y}{X}$ 的表达式中,就能得到过冲。
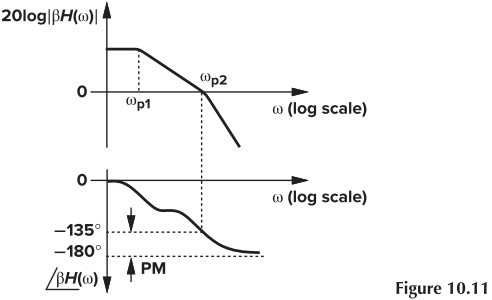
那么多大的 PM 合适呢?我们先考虑最简单的情况:两个极点,并且 $\omega_{p2}= \text{unity-gain bandwidth}$ (Fig. 10.11),那么 $\text{PM}=45^\circ$,利用上述方法,有:
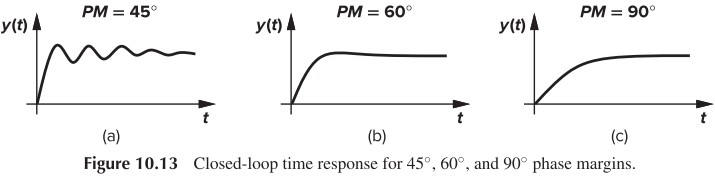
\[\begin{aligned} \vert \frac{Y}{X}(\omega_2) \vert &= \frac{H}{1+\beta H}\\ &=\frac{1}{\beta} \frac{\beta H}{1+\beta H}\\ &=\frac{1}{\beta} \frac{\exp(-j135^\circ)}{1+\exp(-j135^\circ)}\\ &=\frac{1.306}{\beta} \end{aligned}\]改变 PM,我们可以得到不同的过冲。当 $\text{PM}=60^\circ$ 时,$Y/X=1/\beta$,是最理想的情况(实际上此时依然会有少量过冲,一般取 $70^\circ$)。当 $\text{PM}=90^\circ$ 时,$Y/X=0.707/\beta$,此时完全无过冲,但阶跃响应的速度反而没有 $60^\circ$ 时快(Fig. 10.13)。
补充一下,在单极点系统中,unity-gain bandwidth 和 GBW(带宽增益积)是同一个东西,都是指 GX 对应的频率。并且这个值越大,响应速度越快。

最后我们介绍一下已知 $A_0,\omega_1,\omega_2$,如何计算 PM。
- 计算 GBW:
- 先计算 $\omega_2$ 处的增益:$A(\omega_2) = 20\lg(A_0)-20(\lg\omega_2-\lg\omega_1)$
- 再求解 GBW 的方程:$40\lg(\text{GBW}/\omega_2)=A(\omega_2)$
- 或者像我一样,直接一条公式搞定:$\text{GBW} = \sqrt{A_0\omega_1 \omega_2}$
-
代入如下公式:
\[\begin{aligned} \text{PM} &= 180^\circ - \arctan(\tx{GBW}/\omega_1)-\arctan(\tx{GBW}/\omega_2)\\ &=90^\circ - \arctan(\tx{GBW}/\omega_2) \quad {\rm if\; \tx{GBW} \gg \omega_1} \end{aligned}\]
我们一般希望 $\omega_2=3 \tx{GBW}$,就是想要 $\tx{PM}\approx 70^\circ$
对上述公式的简单推导:我们知道传递函数 $\angle H = \angle Y-\angle X$(Y 是分子,X 是分母),并且已知有如下三角公式:
$$
\arctan A + \arctan B = \arctan \frac{A+B}{1-AB}\\
\angle A = \arctan \frac{\tx{img}(A)}{\text{real}(A)}
$$
于是我们只需要证明在 $\omega = \tx{GBW}$ 处,开环增益形如:
$$
\frac{k}{(1-AB)+j(A+B)}\\
A=\frac{\text{GBW}}{\omega_1},\; B= \frac{\text{GBW}}{\omega_2}
$$
假设二阶系统的开环增益为 $A_O = \dfrac{A_{v0}}{(1+j\omega/\omega_1)(1+j\omega/\omega_2)}$,那么:
$$
\begin{aligned}
\beta A_O &= \frac{\beta A_O}{(1+j\omega/\omega_1)(1+j\omega/\omega_2)}\\
&=\frac{\beta A_O}{(1-\dfrac{\omega^2}{\omega_1\omega_2})+j(\dfrac{\omega}{\omega_1}+\dfrac{\omega}{\omega_2})}
\end{aligned}
$$
把 $\omega = \tx{GBW}$ 代入后,符合前面说的形式,得证。
当然,感性上不需这么复杂,看图 Fig. 10.5 可以发现相位在 $\omega_1$ 处很像 $\arctan$ 函数,然后为了满足 $\arctan \omega_1 = -45^\circ$,我们就用 $\arctan(\omega/\omega_1)$ 来拟合计算。($\omega_2$ 也是类似的)
Basic Freq Compensation
Compensation of Two-Stage Op Amps
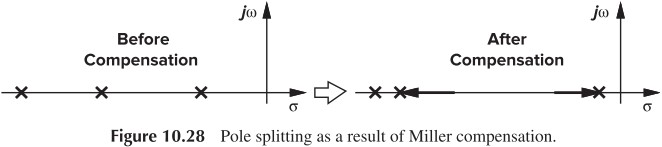
要增大 Phase Margin,我们希望 主极点靠近原点,非主极点远离原点,这样的目的是使增益在 $-180^\circ$ 之前尽可能下降得多。这称为 极点分离 。有两种方法实现这一点。
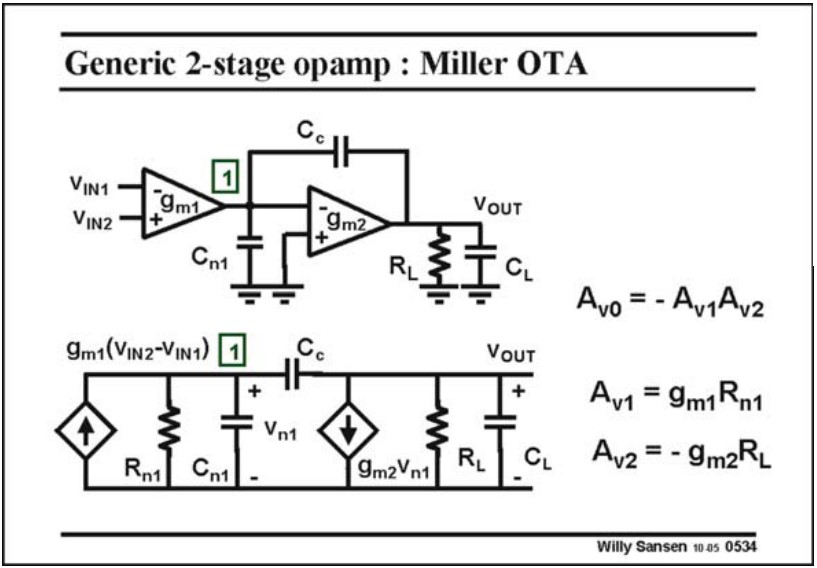
Miller Compensation
我们考虑下图中的两级 OPA,$C_c$ 为 Miller Capacitor,$R_{n1}$ 是第一级的输出阻抗。我们可以画出等效的小信号模型,注意到这个模型和频率响应一节中的 CS Stage 是一样的,故直接写出频率响应
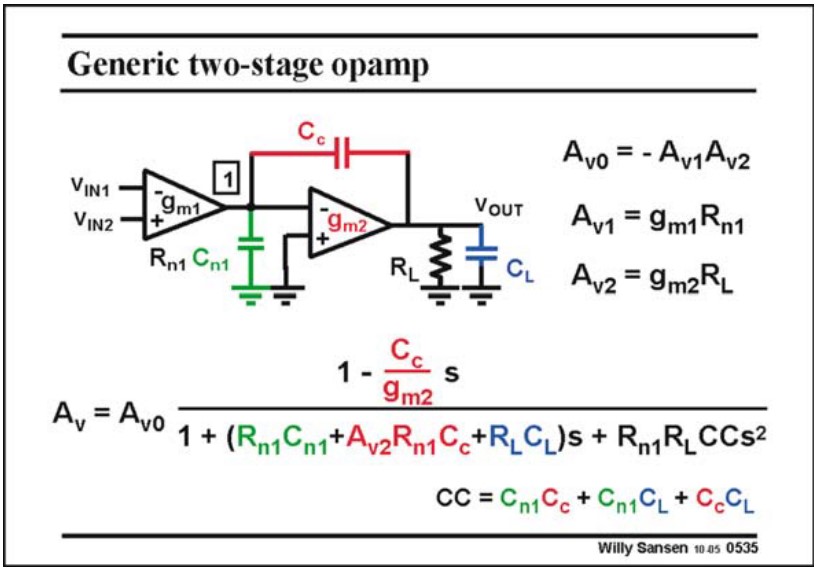
下面我们来分析 $C_c$ 对极点的影响。首先为了求解零点,我们将上式化简为:
\[A = A_0 \frac{1-cs}{1+as+bs^2}\]这么一来就能写出零、极点(假设两个极点离得比较远):
\[s_z = \frac{1}{c}\\ 主极点\; s_{p1} = -\frac{1}{a}\\ 非主极点\; s_{p1} = -\frac{a}{b}\]注意到当 $a$ 增大时,主极点会减小,非主极点会变大,那么我们可以通过增大 $C_c$ 来增大 $a$
- 当 $C_c$ 较小时,$a$ 可看作与 $C_c$ 无关
- 当 $C_c$ 较大时,$a=A_{v2}R_{n1}C_c$
- 此时的主极点为 $f_d = \dfrac{1}{2\pi A_{v2}R_{n1}C_c}$,显然 $C_c$ 越大,$f_d$ 越小
- 非主极点为 $f_{nd}=\dfrac{A_{v2}R_{n1}C_c}{2\pi R_{n1}R_L CC}$
- 如果 $C_c$ 不够大,那么 $CC\approx C_{n1}C_L$,显然 $C_c$ 越大,$f_{nd}$ 越大
- 如果 $C_c$ 很大,那么 $CC\approx C_c(C_{n1}+C_L)$,此时 $f_{nd}$ 与 $C_c$ 无关。
综合以上分析,我们可以得到下面这幅图:
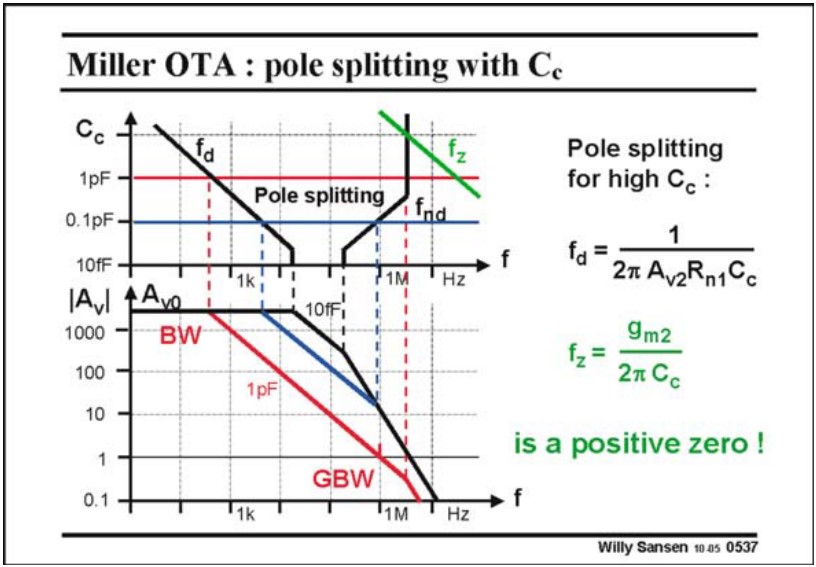
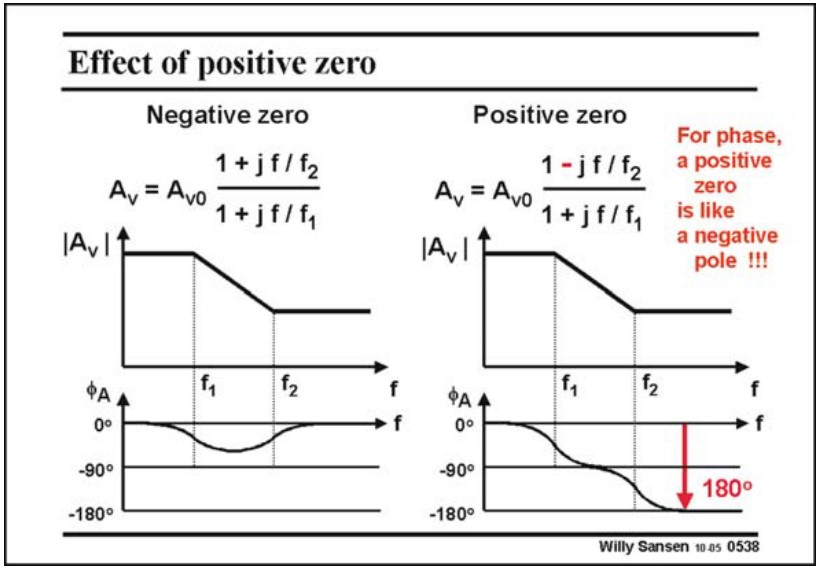
注意到图中还有一条绿色的线,那是零点,其表达式为 $f_z = \dfrac{g_m}{2\pi C_c}$,如果 $C_c$ 很大,那么零点就会靠近原点,并且由于这是个正零点,所以会使得相位 $-90^\circ$(见下图),这是我们不希望的。所以 $C_c$ 不能太大。当然,我们后面也会讲处理零点的方法。
Choice of Cc
$C_c$ 不能太小,也不能太大。前面说了,$f_{nd}$ 一般是 $3 \tx{GBW}$(对应 70° 的相位裕度),所以我们可以利用这个求出 $C_c$
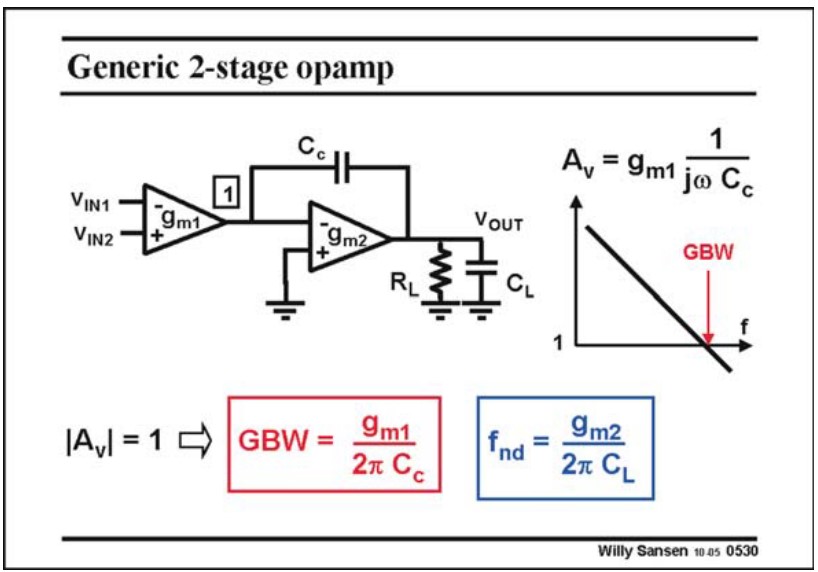
先求 $\tx{GBW}$,为了简化分析,我们先忽略 $C_{n1}$,得到下图。图中,易知 $V_\tx{out} \cdot j\omega C_c =-g_{m1} V_\tx{in} $,故 $A_v = -g_{m1} \dfrac{1}{j\omega C_c}$,当 $\omega = \dfrac{g_{m1}}{C_c}$ 时,$\vert A_v \vert =1$,所以 $\tx{GBW} = \dfrac{g_{m1}}{2\pi C_c}$
下面再求 $f_{nd}$
\[\begin{aligned} f_{nd}&=\frac{A_{v2}R_{n1}C_c}{2\pi R_{n1}R_L CC}\\ &=\frac{g_{m2}C_c}{2\pi (C_{n1}C_c+C_{n1}C_L+C_cC_L)}\\ &\approx \frac{g_{m2}}{2\pi C_L} \frac{1}{1+\dfrac{C_{n1}}{C_c}} \end{aligned}\]代入 $f_{nd}=3 \tx{GBW}$,得到:
\[\frac{g_{m2}}{g_{m1}} = 3 \frac{C_L}{C_c} \left(1+\dfrac{C_{n1}}{C_c}\right)\]由于我们一般取 $\dfrac{C_{n1}}{C_c}=0.3$ (我也不知道为什么……),最终我们得到:
\[\frac{g_{m2}}{g_{m1}} = 4 \frac{C_L}{C_c}\\ \Rightarrow g_{m2} C_c = 4 g_{m1} C_L\]在设计时,一般给定了 $\tx{GBW}$ 和 $C_L$,我们可以按如下步骤求 $g_m$、$C_c$:
- 根据 $f_{nd}=3 \tx{GBW}=\dfrac{g_{m2}}{2\pi C_L\cdot 1.3}$,求出 $g_{m2}$
- 根据 $\dfrac{g_{m2}}{g_{m1}} = 4 \dfrac{C_L}{C_c}$,求出 $C_c$
- 根据 $\tx{GBW}=\dfrac{g_{m1}}{2 \pi C_c}$,求出 $g_{m1}$
Increase gm2
注意到在极点的表达式中:$f_d = \dfrac{1}{2\pi A_{v2}R_{n1}C_c}$ 与 $f_{nd}=\dfrac{A_{v2}R_{n1}C_c}{R_{n1}R_L CC}$ 都有 $A_{v2}$,那么我们可以通过增大 $A_{v2}$ 来让极点分离。
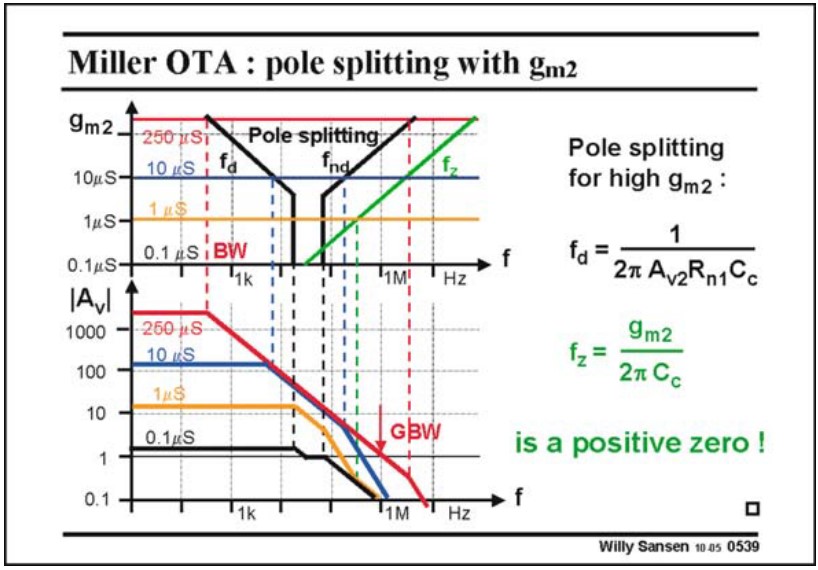
这种方法与 Miller Compensation 的区别是,非主极点会一直随着 $A_{v2}$ 一起增大,并且 $f_z$ 也会随 $A_{v2}$ 增大而远离原点,这再好不过了!
但这种方法也有缺点:the current consumption increases drastically