\[\begin{align*}
\newcommand{\dif}{\mathop{}\!\mathrm{d}}
\newcommand{\p}{\partial}
\end{align*}\]
环量
- 环量
- 在矢量场$\vec{A}$ 中,矢量 $\vec{A}$ 沿某一闭合路径的线积分,定义为该矢量沿此闭合路径的环量(circulation),记作:
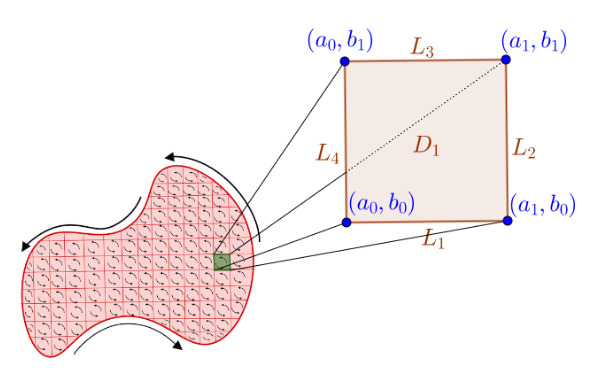
环量面密度
过点 $P$ 作一微小曲面 $\Delta S$,沿其边界做环量积分,方向符合右手法则,当 $\Delta S \rightarrow P$ 时,存在极限:
\[\frac{\dif \Gamma}{\dif S} = \lim_{\Delta S \rightarrow 0} \frac{1}{\Delta S} \oint_{\Delta L} \vec{A}\cdot\dif \vec{l}\]则将此极限定义为 环量面密度。
旋度
- 旋度
- 矢量 $\vec{A}$ 的 旋度(rotation) 记为 $\text{rot} A$定义为:
- \[\text{rot}\vec{A}\cdot \vec{n}=\lim_{\Delta S\rightarrow 0} \frac{\oint_c \vec{A}\cdot\dif \vec{l}}{\Delta S}\]
计算公式:
直角坐标
柱坐标
球坐标
记忆方法还是和前面散度一样的:
\[\nabla\times A= \begin{vmatrix} \frac{\vec{a}_1}{h_2h_3} & \frac{\vec{a}_2}{h_1h_3} & \frac{\vec{a}_3}{h_1h_2}\\ \frac{\p}{\p u_1} & \frac{\theta}{\p u_2} & \frac{\p}{\p u_3}\\ h_1F_1 & h_2F_2 & h_3 F_3 \end{vmatrix}\]其中,$F_1,F_2,F_3$ 就是矢量场的各个分量,$h_1,h_2,h_3$ 是 Lame系数,通俗来讲就是长度元表达式的系数:
- 对柱坐标系:$h_1=1, h_2=r, h_3=1$
- 对球坐标系:$h_1=1, h_2=r, h_3=r\sin\theta$
旋度的性质:
- $\nabla\times \vec{C}=\vec{0}$
- $\nabla\times(C\vec{F})=C\nabla\times\vec{F}$
- $\nabla\times(\vec{F}\pm\vec{G})=\nabla\times\vec{F} \pm \nabla\times \vec{G}$
- $\nabla\times(u\vec{F})=u\nabla\times\vec{F}+\nabla u\times\vec{F}$
- $\nabla\cdot(\vec{F}\times\vec{G})=\vec{G}\cdot(\nabla\times\vec{F})-\vec{F}\cdot(\nabla\times\vec{G})$ 证明
重要恒等式
-
梯度的旋度恒为0(证明方法:$\dfrac{\p^2u}{\p x\p y}=\dfrac{\p^2u}{\p y\p x})$
\[\text{rot}(\text{grad}\,u)=\nabla\times\nabla u=0\] -
旋度的散度恒为0(证明方法同上)
\[\text{div}(\text{rot}\vec{A})=\nabla\cdot(\nabla\times\vec{A})=0\]
由上我们可知,如果某个矢量场:
- 旋度=0,可表示为标量函数的梯度 $\nabla u$
- 散度=0,可表示为矢量函数的旋度 $\nabla\times \vec{A}$
注意 我们可以通过 “梯、旋、散” 来记忆。后面我们统一用 梯旋散公式 指代上面一系列的结论。
斯托克斯公式
\[\oint_c \vec{A}\cdot\dif\vec{l} = \int_S\nabla\times\vec{A}\cdot\dif\vec{S}\]