\(\newcommand{\dif}{\mathop{}\!\mathrm{d}} \newcommand{\xleftrightarrow}[1]{\stackrel{#1}{\longleftrightarrow}} \newcommand{\L}{\mathcal{L}} \newcommand{\ft}{\xleftrightarrow{\F}} \newcommand{\red}[1]{\color{orangered}{#1}}\)
下面来讨论如何利用拉普拉斯分析系统。
系统函数
系统函数一般有如下形式:

时域上,$r(t)=e(t)*h(t)$,根据拉氏变换的卷积性质,有 $R(s)=E(s)\cdot H(s)$,所以:
\[H(s)=\frac{R(s)}{E(s)}=\frac{零状态响应拉氏变换}{激励信号拉氏变换}\]如果系统由微分方程表征:
\[\sum_{k=0}^n a_k \frac{\dif^k r(t)}{\dif t^k} = \sum_{j=0}^m b_j \frac{\dif^j e(t)}{\dif t^j}\]对两边取拉氏变换,可以得到LCCDE描述的系统函数:
\[\sum_{k=0}^n a_k s^k R(s) = \sum_{j=0}^m b_j s^j E(s)\\ H(s)=\frac{R(s)}{E(s)}=\frac{\sum_{j=0}^m b_j s^j}{\sum_{k=0}^n a_k s^k}\]我们可以将系统函数改写为:
\[H(s)=\frac{B(s)}{A(s)}=K\frac{\prod_{j=1}^m (s-z_j)}{\prod_{k=1}^n (s-p_k)}\]从而可以得到系统的零点 $z_i$、极点 $p_i$ 和零极点图。
系统联结
LTI系统并联:
\[H(s)=H_1(s)+H_2(s)\\ \rm{ROC}=R_1\cup R_2\]LTI系统串联:
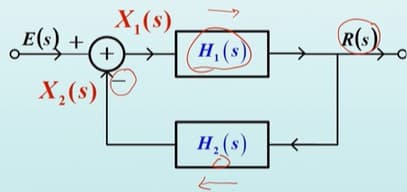
\[H(s)=H_1(s)H_2(s)\\ \rm{ROC}=R_1\cup R_2\]LTI系统反馈:
系统因果性
要求收敛域在收敛轴的右端(右边信号)
系统稳定性
之前说过,稳定性指:有界输入得到有界输出(BIBO)。系统稳定,则必须满足如下充要条件:
\[绝对可积条件:\int_{-\infty}^{+\infty} |h(t)|\dif t\leq M\]证明
\[必要性:若 \int_{-\infty}^{+\infty} |h(t)|\dif t 无界,则可构造有界输入信号:\\ e(-t)=\begin{cases} -1 & h(t)<0\\ 1 & h(t)\geq 0 \end{cases}\\ 则 e(-t)h(t)=|h(t)|\\ r(0)=\int_{-\infty}^{+\infty}h(\tau)e(-\tau)\dif \tau = \int_{-\infty}^{+\infty} |h(\tau)| \dif \tau\\ \therefore 存在有界信号使得 r(0) 无界\]
在时域上,系统稳定性可以通过 $\int_{-\infty}^{+\infty} \vert h(t)\vert \dif t\leq M$ 判定,对应在 s域要满足:$H(s)$ 的收敛域包含虚轴。如果再要求系统是因果的,则要满足:极点位于左半平面。我们可以通过单位冲激响应来验证这个结论:
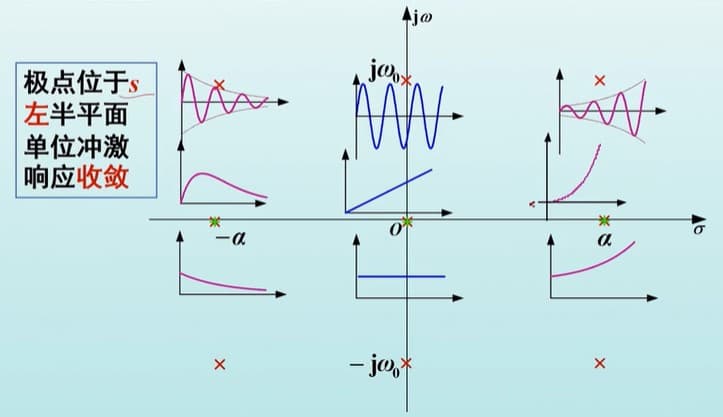
因果系统稳定性判定方法:
- 稳定系统:全部极点位于左半平面(不含虚轴),$\lim_{t\rightarrow\infty}h(t)=0$
- 不稳定系统:极点位于右半平面,或虚轴上有二阶或以上极点,$\lim_{t\rightarrow\infty}h(t)\rightarrow \infty$
- 临界稳定(不稳定)系统:极点位于虚轴,且只有一阶,$\lim_{t\rightarrow\infty}h(t)$ 为非零数值或等幅振荡。
零极点与波形特征
下面用几张gif图来说明系统零极点与 $h(t)$ 的关系。
MATLAB 代码
参考:https://www.jianshu.com/p/cd9501bc810a1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
clc;clear;close all;
k=1;
for i = [-0.5:0.1:0 0.2:0.2:0.8]
set(gcf,'Position',[0,0,500,250], 'color','w');
b=1; %分子
a=[1 i]; %分母
sys=tf(b,a); %构造s域表达式
subplot(121)
pzmap(sys) %画 poles zeros map
axis([-1 1 -1 1])
subplot(122)
impulse(b,a) %画 h(t)
axis([-1 3 -1 5])
%制作gif
if i == -0.5
%首帧,设置样式和大小
frame = getframe(gcf); % 获取整个窗口内容的图像
im=frame2im(frame);
[I{k},map{k}]=rgb2ind(im,8);
imwrite(I{k},map{k},'1.gif','gif','Loopcount',Inf,'DelayTime',0.4);
else
frame = getframe(gcf);% 获取整个窗口内容的图像
im=frame2im(frame);
[I{k},map{k}]=rgb2ind(im,8);
%追加模式
imwrite(I{k},map{k},'1.gif','gif','WriteMode','append','DelayTime',0.2);
end
k=k+1;
end
for i = (k-1):-1:1
imwrite(I{i},map{i},'1.gif','gif','WriteMode','append','DelayTime',0.2);
end
- $H(s)=\dfrac{1}{s+\alpha} \xleftrightarrow{\L} h(t)=e^{-\alpha t}u(t)$
- 极点在左实轴 ↔ $h(t)$ 衰减
- 极点在原点 ↔ $h(t)$ 等幅
- 极点在右实轴 ↔ $h(t)$ 增长
- $H(s)=\dfrac{\omega_0}{(s+\alpha)^2+\omega_0^2} \xleftrightarrow{\L} h(t)=e^{-\alpha t}\sin(\omega_0 t)u(t)$
- 极点在左半平面 ↔ $h(t)$ 衰减振荡
- 极点在虚轴 ↔ $h(t)$ 等幅振荡
- 极点在右半平面 ↔ $h(t)$ 增长振荡
- 注:图中为二重极点
- $H(s)=\dfrac{1}{(s+\alpha)^2} \xleftrightarrow{\L} h(t)=te^{-\alpha t}u(t)$
- 极点在左实轴 ↔ $h(t)$ 衰减
- 极点在原点 ↔ $h(t)$ 线性增长
- 极点在右实轴 ↔ $h(t)$ 增长
信号、系统的极点与响应的关系
设激励为 $e(t)$,系统为 $h(t)$,对应的拉氏变换为:$E(s)=\dfrac{A_E(s)}{\prod_{i=1}^m (s-q_i)}$,$H(s)=\dfrac{A_H(s)}{\prod_{i=1}^n (s-p_i)}$
\[\begin{align} 零状态响应:R(s)&=E(s)H(s)\\ &=\dfrac{A_E(s)}{\prod_{i=1}^m (s-q_i)}\cdot \dfrac{A_H(s)}{\prod_{i=1}^n (s-p_i)}\\ &=\sum_{i=1}^m \frac{X_i}{s-q_i}+\sum_{=1}^n \frac{Y_i}{s-p_i}\\ &=强迫响应+自由响应 \end{align}\]系统的极点 $p_i$ 称为 自然频率 或 固有频率。
系统的频率响应
前提:系统是因果稳定系统(极点全部位于左半平面,收敛域包括虚轴)
假设输入信号为 $e(t)=E_m \sin (\omega_0 t)$,$E(s)=\frac{E_m\omega_0}{s^2+\omega_0^2}$,则响应为:
\[\begin{align} R(s)&=\frac{E_m \omega_0}{s^2 + \omega_0^2}\cdot H(s)\\ &=\frac{K_{-j\omega_0}}{s+j\omega}+\frac{K_{j\omega_0}}{s-j\omega_0}+\frac{K_1}{s-p_1}+\cdots+\frac{K_n}{s-p_n}\\ \end{align}\]对于稳定系统,其系统函数 $h(t)$ 是随时间衰减,如果要求稳态响应,只要求前两项。先求系数 :
\[K_{-j\omega_0}=(s+j\omega_0)R(s)\Big\vert_{s=-j\omega_0}=\frac{E_m\omega_0H(-j\omega_0)}{-2j\omega_0}\]由于 $h(t)$ 是实函数,所以 $H(-j\omega_0)=H^*(j\omega_0)=H_0 e^{-j\phi_0}$(写成幅度与角度的形式),代入上式:
\[K(-j\omega_0)=\frac{E_mH_0 e^{-j\phi_0}}{-2j}\\ 同理,K(j\omega_0)=\frac{E_m H_0 e^{j\phi_0}}{2j}\]所以稳态响应为:
\[R_{ss}(s)=\frac{E_mH_0}{2j}(-\frac{e^{-j\phi_0}}{s+j\omega_0}+\frac{e^{j\phi_0}}{s-j\omega})\\ \begin{align} r_{ss}(t)&=\frac{E_mH_0}{2j}(-e^{-j\phi_0}e^{-j\omega_0t}+e^{j\phi_0}e^{j\omega_0 t})\\ &=E_m H_0 \sin (\omega_0 t+\phi_0) \end{align}\]由零、极点确定频率响应
系统函数写成零、极点的形式就是:
\[H(s)=K\frac{\prod_{i=1}^m(s-z_i)}{\prod_{i=1}^n (s-p_i)}\\ H(j\omega)=K\frac{\prod_{i=1}^m(j\omega-z_i)}{\prod_{i=1}^n (j\omega-p_i)}\]我们将分子、分母写成如下形式:
\[\begin{cases} j\omega-z_j=N_j e^{j\psi_j}\\ j\omega-p_i=M_i e^{j\theta_i} \end{cases}\\ H(j\omega)=K\frac{\prod_{i=1}^m N_i e^{j\psi_i}}{\prod_{i=1}^n M_i e^{j\theta_i}}\\ \therefore |H(j\omega)|=K\frac{N_1\cdots N_m}{M_1\cdots M_n} \quad \varphi(\omega)=\sum_{i=1}^m \psi_i - \sum_{i=1}^m \theta_i\\\]下面来说明如何在零、极点图上找出 $N_i$,$M_i$,$\psi_i$,$\theta_i$。以零点为例:$j\omega - z_j = N_j e^{j\psi_j}$,而 $z_j$ 是零点,可以在图中找到;$j\omega$ 是频率,可以由我们给定的。因此,由矢量运算,可以得到下图:
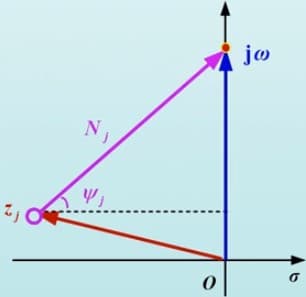
可见,只需要将零点(或极点)与虚轴上的特点频率点连接,就能得到 $N_i$,$M_i$,$\psi_i$,$\theta_i$。故我们可以从图中定性地得到频率响应特性,用下面例题来说明。
例题:已知电容的 s域模型为 $\frac{1}{sC}$,电阻的 s域模型为 $R$,现将一个电容、一个电阻串联,输入电压 $V_1(s)$,电阻上输出电压 $V_2(s)$。分析频率响应特性。
解:$H(s)=\dfrac{V_2(s)}{V_1(s)}=\dfrac{s}{s+\frac{1}{RC}}$,$H(j\omega)=\dfrac{V_2(j\omega)}{V_1(j\omega)}=\dfrac{j\omega}{j\omega+\frac{1}{RC}}$
作出零极点图:
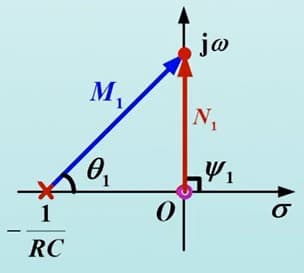
而 $\vert H(j\omega) \vert = \frac{N_1}{M_1}$,从图中可以看出,当 $\omega$ 趋近于 0 时,$N_1 \ll M_1$,$\vert H(j\omega) \vert\approx 0$;随着 $\omega$ 增加,$N_1 \approx M_1$,$\vert H(j\omega) \vert\approx 1$。所以这是个高通滤波电路。
$$ \vert H(j\omega) \vert = \frac{N_1}{M_1} =\frac{\omega}{\sqrt{\omega^2+(\frac{1}{RC})^2}} $$