线性时不变系统的性质
$$\begin{align*}\newcommand{\dif}{\mathop{}\!\mathrm{d}}\end{align*}$$冲激响应与LTI系统的性质
上一节说过,可以利用信号与单位冲激响应的卷积来表示一个LTI系统:
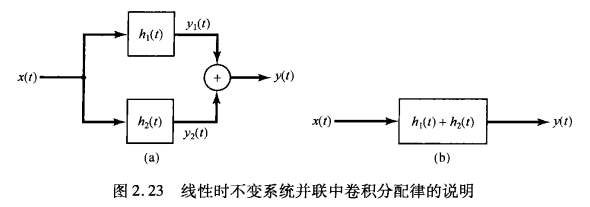
$$ y[n]=\sum_{k=-\infty}^{+\infty} x[k]h[n-k]=x[n]*h[n]\\ y(t)=\int_{-\infty}^{+\infty} x(\tau)h(t-\tau)\dif \tau=x(t)*h(t) $$那么卷积有的性质,LTI系统一样也有。比如分配律与结合律:

此外可以用卷积来表示LTI系统的其他性质
记忆性(是否只与当前时刻有关):无记忆系统的冲激响应满足:$h[n]=K\delta[n]$,$h(t)=K\delta(t)$
可逆性:是否能找到一个逆系统,使得 $h(t)*h_1(t)=\delta(t)$
因果性:如果 $h[n]=0,n< 0$ 或 $h(t)=0,t< 0$,则系统是因果的。因此我们将 $n< 0$ 或 $t< 0$ 时为零的信号称为 因果信号
稳定性:有界信号要产生有界输出,则 $h[n]*x[n]\leq B \sum_{k=-\infty}^{+\infty} \vert h[k] \vert \lt \infty$,$B$是信号的上界,所以稳定系统的脉冲/冲激响应满足:
$$ \sum_{k=-\infty}^{+\infty} \vert h[k] \vert< \infty\\ \int_{-infty}^{+\infty} |h(\tau)|\dif \tau < \infty $$这个叫绝对可和、绝对可积
微分/差分方程描述的LTI系统
线性系统响应的时域求解法:
- 求转移算子 $H(p)$
- 求零输入响应
- 求零状态响应
- 求冲激响应
- 输入与冲激响应相卷积
- 将零输入和零状态叠加
求冲激响应
在求响应之前,先分清零输入响应与零状态响应,以及为什么要区分这两个东西。其实这俩东西电路中就已经学过了,但至于为什么要区分这东西,其实理由挺多的。比如前面说的“增量线性系统” $r(t)=e(t)+C$, $C\neq 0$ 就分为零输入与零状态两个部分。还有上一节那个利用积分求卷积的,上移一个单位后,也可以分为零输入与零状态两个部分。而我们上面所说的,都只是针对零状态响应,并未考虑零输入响应。
系统方程/算子法
设系统满足方程:$y'(t)-\lambda y(t) = kx(t)$,如果我们要求冲激响应,也就是解 $h'(t)-\lambda h(t) = k\delta(t)$,并且由于冲激响应是零状态响应,所以我们有初始条件: $h^{(n)}(0)=0,n=0,1,2,\cdots$
下面对等式两边同乘 $e^{-\lambda t}$:
$$ e^{-\lambda t} h'(t)-e^{-\lambda t} \lambda h(t) = e^{-\lambda t} k\delta(t) $$注意到:$[e^{-\lambda t} h(t)]'=e^{-\lambda t} h'(t)-e^{-\lambda t} \lambda h(t)$,所以:
$$ [e^{-\lambda t} h(t)]'= e^{-\lambda t} k\delta(t) $$对两边求 $0^-$ 到 $t$ 的积分:
$$ e^{-\lambda t} h(t) - h(0)=ku(t)\\ 又因为 h(0)=0,所以得到:\\ h(t)=ke^{\lambda t} u(t) $$同时,如果我们定义 $p$ 算子:$ph(t)$ 表示对 $h(t)$ 做一阶微分,那么微分方程可以表示成:
$$ h(t)=\frac{k}{p-\lambda}\delta(t)\\ 或\,h(t)=H(p)\delta(t) ,\; H(p)=\frac{k}{p-\lambda} $$从而:
$$ h(t)=\frac{k}{p-\lambda}\delta(t)=h(t)=ke^{\lambda t} u(t) $$在实际应用中也有用处。比如:电容满足:$i=C\frac{\dif u}{\dif t}=Cpu$,从而 $R=u/i=1/(Cp)$,那么,要求RC回路的电容电压,我们有:
$$ u_c=\frac{\frac{1}{Cp}}{R+\frac{1}{Cp}}=\frac{\frac{1}{RC}}{p+\frac{1}{RC}}=\frac{1}{RC} e^{-\frac{1}{RC}t} u(t) $$那么对于二阶系统呢?
我们考虑 $h(t)=\frac{1}{p^2+3p+2}\delta(t)$,可以分解成:
$$ \begin{align} h(t)&=(\frac{1}{p+1}+\frac{-1}{p+2})\delta(t)\\ &=\frac{1}{p+1}\delta(t)+\frac{-1}{p+2}\delta(t) \end{align} $$从而可以分解成两个一阶系统之和。因此对于任意阶系统:
$$ H(p)=\frac{N(p)}{D(p)}=\frac{\sum b_m p^m}{\sum a_n p^n}\\ $$如果 $H(p)$ 是真分式,即 $m\lt n$,并且 $\lambda_1 \neq \lambda_2 \neq \cdots \neq \lambda_n$,则:
$$ H(p)=\frac{N(p)}{D(p)}=\frac{\sum b_m p^m}{\sum a_n p^n}\\ =\frac{k_1}{p-\lambda_1}+\cdots+\frac{k_n}{p-\lambda_n} $$我们都可以通个分解成一阶系统之和来求解。
如果 $m\geq n$,则可以利用长除法转化成多项式+真分式
如果存在两个甚至多个 $\lambda$ 相等,可以证明:
求零状态响应
将冲激响应与输入信号卷积。
求零输入响应
这还不简单吗……把 $x(t)=0$ 代入微分方程,先求特征根,根据特征根求得形式解,然后代入题目条件得到特解。
常见特征根对应得形式解:
$$ \lambda为实数,Ce^{\lambda t} $$由于我们一般只关心0以后的值,题目给的条件也只是给0时刻的初始值,所以求出零输入响应后,要乘上 $u(t)$。
求全响应
全响应 = 零状态响应 + 零输入响应
此外,全响应也可以分成:自然响应 + 受迫响应。自然响应指的是系统本身产生的响应,包括零输入响应以及部分零状态响应,而那部分的零状态响应的形式必须与零输入响应相同。比如:零输入为 $e^{-t}u(t)$,零状态为 $\frac{1}{2} e^{-t}u(t)$,那么这两个都是自然响应。
此外,全响应还可以分成:瞬态响应 + 稳态响应。主要看 $+\infty$ 时信号是否为 0,为 0 就是瞬态响应,不为 0 就是稳态响应。