Z变换分析
$$ \begin{align*} \newcommand{\dif}{\mathop{}\!\mathrm{d}} \newcommand{\belowarrow}[1]{\mathop{#1}\limits_{\uparrow}} \newcommand{\bd}{\boldsymbol} \newcommand{\L}{\mathscr{L}} \newcommand{\xleftrightarrow}[1]{\stackrel{#1}{\longleftrightarrow}} \end{align*} $$复习
在信号与系统中已经讲过 z 变换了,请回去复习一下:
当然,我这里还是快速过一次吧。z变换的定义如下:
$$ X(z) = \sum_{n=-\infty}^{\infty} x[n] z^{-n} $$由级数理论,级数收敛的充分必要条件为绝对可和,即:
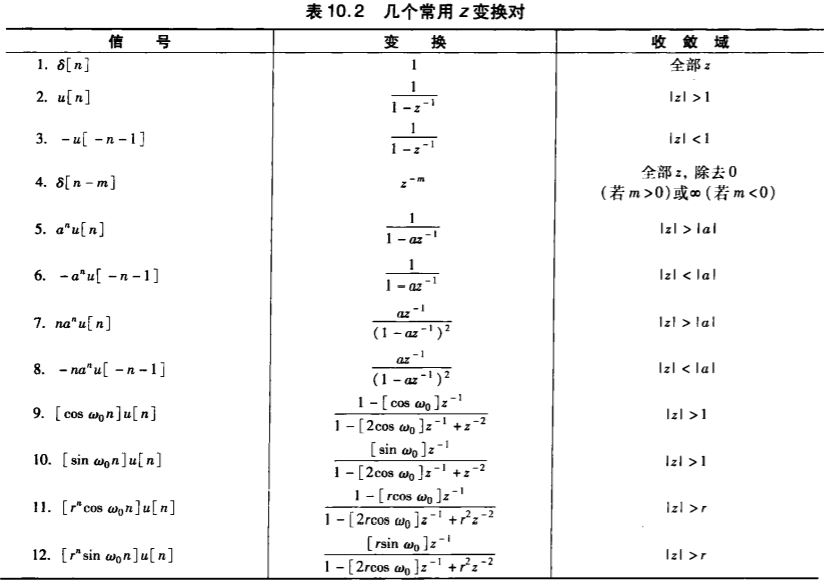
$$ \sum_{n=-\infty}^{\infty} |x[n]z^{-n}|=\sum_{n=-\infty}^{\infty} |x[n]r^{-n}e^{-j\omega n}|\leq \sum_{n=-\infty}^{\infty} |x[n]r^{-n}|< \infty $$可见收敛域(ROC)与 $r$ 的取值有关,所以 ROC 是圆环形的。当我们计算 z 变换时,要求出其收敛域。P.S.,常见 z 变换如下:
求解逆 z 变换有 3 种方法:
- 部分分式展开法
- 幂级数展开法(长除法)
- 围线积分
这些东西请看回信号与系统,我懒得再写一遍了。
传输函数
LTI系统的输入输出关系满足:
$$ y[n]=\sum_{k=-\infty}^{+\infty} h[k]x[n-k]\\ \xleftrightarrow{z} Y(z)=H(z)X(z) $$$H(z)$ 称为 传递函数 或 系统函数。
LTI系统一般用差分方程描述:
$$ \sum_{k=0}^{N} d_k y[n-k]=\sum_{k=0}^{M} p_k x[n-k]\\ \text{本课程只考虑 }d_k,p_k \text{ 是实数的情况} $$对两边做z变换,移项,可以得到传递函数为:
$$ H(z)=\frac{Y(z)}{X(z)}=\frac{\sum_{k=0}^M p_k z^{-k}}{\sum_{k=0}^N d_k z^{-k}}=\frac{p_0\prod_{l=1}^M (z-\xi_l)}{d_0\prod_{l=1}^M (z-\lambda_l)} $$对于 FIR 系统,由于 $N=0$(也就是只有 $y[n]$ 项,没有 $y[n-k]$ 项),所以其传递函数的形式为:$H(z)=\sum_{n=M_1}^{M_2} h[n] z^{-n}$,$0\leq M_1 \leq M_2$,极点在 $z=0$ 处,所以收敛域为除 $z=0$ 外的整个 z 平面。
对于 IIR 系统,由于是因果系统,所以收敛域为 $\vert z\vert > \max_k \vert \lambda_k \vert$,$\lambda_k$ 为极点。
习题
Tip
6.10 求下面因果序列的 $z$ 变换及其对应的收敛域。假设 $\vert\beta\vert=\vert \alpha \vert >0$,给出零极点图并在图中标明收敛域。
[!NOTE]
解:通过已学知识可知:
常用z变换对 $u[n] \xleftrightarrow{z} \frac{1}{1-z^{-1}}, \vert z \vert>1$
时移:$x[n-m] \xleftrightarrow{z} z^{-m}X[z]$,影响 0 和 $\infty$ 的收敛性
时反:$x[-n] \xleftrightarrow{z} X[z^{-1}]$,收敛域为原收敛域的点的倒数集合
指数加权:$a^n x[n] = \xleftrightarrow{z} X[a^{-1}z]$,收敛域拉伸为 $\vert a \vert$ 倍
因此,可以直接写出 z 变换:
Tip
6.13 求下面 z 变换可能的收敛域和对应的逆 z 变换:
[!NOTE]
解:极点为:$\lambda_1 = -0.6$,$\lambda_2=\lambda_3=0.4$,所以可能的收敛域为:
$$ X_c(z) = \frac{2}{1+0.6z^{-1}}+\frac{3}{1-0.4z^{-1}}+\frac{-1}{(1-0.4z^{-1})^2} $$
- $\text{ROC}_2$:$x_1[n] = -2(-0.6)^n u[-n-1] - 3 (0.4)^n u[-n-1]+2.5(n+1)(0.4)^{(n+1)} u[-n-2]$
- $\text{ROC}_3$:$x_2[n] = -2(-0.6)^n u[-n-1] + 3 (0.4)^n u[n]-2.5(n+1)(0.4)^{(n+1)} u[n+1]$
- $\text{ROC}_4$:$x_2[n] = 2(-0.6)^n u[n] + 3 (0.4)^n u[n]-2.5(n+1)(0.4)^{(n+1)} u[n+1]$
[!CAUTION]
[!TIP] 6.38 利用多项式相乘法计算: $g[n]=\{-3, 2,5\}$ 和 $h[n]=\{4,-3,1,-4\}$ 的线性卷积和圆周卷积
[!NOTE]
解:先写出传递函数:
则线性卷积为:
$$ \begin{aligned} Y_L(z)&=G(z)H(z)\\ &=-12+17z^{-1}+11z^{-2}-z^{-3}-3z^{-4}-20z^{-5} \end{aligned} $$
圆周卷积为:
Tip
6.63 求 $h[n]=\delta[n]-\alpha \delta[n-R], \vert\alpha \vert< 1$ 幅度响应的最值。
Note
解:容易写出:$H(e^{j\omega})=1-\alpha e^{-j\omega R}$,所以幅度响应为:
当 $\omega = \frac{2k \pi}{R}$ 时取最大值 $1+\vert \alpha \vert$;当 $\omega = \frac{(2k+1) \pi}{R}$ 时取最小值 $1-\vert \alpha \vert$。
[!TIP]
6.81 LTI离散时间系统的传输函数为:
问:该系统的频率响应 $H(e^{j\omega})$ 是否存在?该系统可能稳定吗?可能是因果的吗?并在不求逆 z 变换的情况下确定 $h[n]$ 的形式。
Note
解:在 $z=0.3$,$z=0.6$,$z=-5$ 处有极点,当 $\text{ROC}$ 取 $0.6 < \vert z \vert < 5$ 时,系统稳定且存在频率响应。
在稳定的情况下,系统不可能是因果的,因为 $\text{ROC}$ 不包含 $\infty$.
$h[n]=A(-0.3)^n u[n]+B(0.6)^n u[n]+C(-5)^n u[n]$